Project GROPE - Εισαγωγή Δεδομένων στον Τρισδιάστατο Χώρο
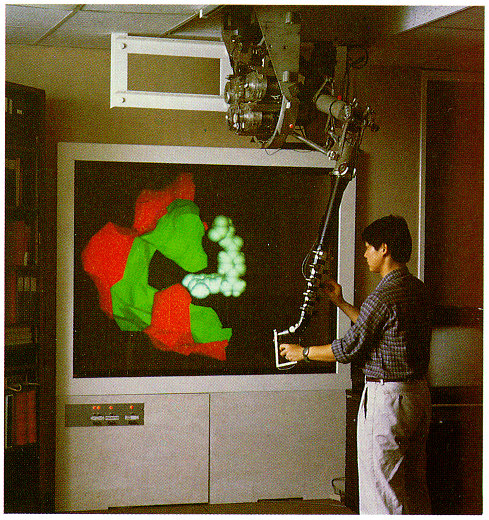
Το Project GROPE (1967-1990) στο Πανεπιστήμιο της Βόρειας Καρολίνας (UNC) αποτελεί την πρώτη ολοκληρωμένη προσπάθεια σχεδιασμού μιας συσκευής εισόδου που εισάγει την αίσθηση της αφής (haptics) στην αλληλεπίδραση ανθρώπου–υπολογιστή. Σε αντίθεση με το παραδοσιακό ποντίκι ή το SpaceMouse που προσφέρουν οπτική μόνο πλοήγηση, το σύστημα GROPE χρησιμοποίησε έναν τροποποιημένο ρομποτικό βραχίονα (Argonne Remote Manipulator - ARM) ως συσκευή εισόδου, επιχειρώντας να γεφυρώσει το χάσμα μεταξύ ψηφιακής αναπαράστασης και φυσικής αντίληψης.
Η ιστορία του Project GROPE σηματοδοτεί τη μετάβαση από την «απλή κατάδειξη» στην «ενσώματη χειραγώγηση». Ενώ τεχνολογίες όπως το Trackball ή το Graphic Tablet επιτρέπουν την εισαγωγή θέσης (X, Y), το GROPE εισήγαγε την αμφίδρομη ροή πληροφορίας στη συσκευή εισόδου. Το σύστημα δεν δεχόταν απλώς εντολές κίνησης από τον χρήστη, αλλά αντιδρούσε ενεργητικά, ασκώντας δυνάμεις στο χέρι του χρήστη όταν τα ψηφιακά αντικείμενα (π.χ. μόρια φαρμάκων) έρχονταν σε επαφή ή απωθούνταν μεταξύ τους. Έτσι, το Input Device μετατράπηκε από παθητικό εργαλείο σε ενεργό συνεργάτη στην εξερεύνηση του χώρου.
Η σχεδιαστική φιλοσοφία του GROPE βασίστηκε στην ιδέα ότι η ανθρώπινη κατανόηση του τρισδιάστατου χώρου είναι εγγενώς κιναισθητική. Αντί ο χρήστης να προσπαθεί να κατανοήσει τη θέση ενός αντικειμένου μόνο κοιτάζοντας μια οθόνη, το σύστημα του επέτρεπε να «πιάσει» το αντικείμενο μέσω της λαβής του βραχίονα και να νιώσει τα όριά του [1]. Αυτή η προσέγγιση επιβεβαίωσε την υπόθεση ότι η προσθήκη απτικής ανάδρασης στη συσκευή εισόδου μειώνει τον χρόνο ολοκλήρωσης σύνθετων εργασιών και βελτιώνει την αντίληψη του χρήστη για τη γεωμετρία των δεδομένων.
Ωστόσο, το Project GROPE ανέδειξε και τους σημαντικούς περιορισμούς των μηχανικών συσκευών εισόδου. Η τεράστια πολυπλοκότητα του εξοπλισμού, το κόστος και η ανάγκη για πραγματικό χρόνο απόκρισης (real-time processing) ώστε η αίσθηση να είναι συγχρονισμένη με την εικόνα, αποτέλεσαν σοβαρά εμπόδια. Ο ίδιος ο βραχίονας ARM ήταν βαρύς και είχε τριβές που αλλοίωναν την καθαρότητα της αίσθησης, δημιουργώντας έναν τεχνολογικό «θόρυβο» στην επικοινωνία ανθρώπου-μηχανής [2]. Αυτοί οι περιορισμοί εξηγούν γιατί τέτοιες συσκευές δεν έγιναν αμέσως καταναλωτικά προϊόντα, αλλά παρέμειναν για δεκαετίες σε ερευνητικά εργαστήρια.
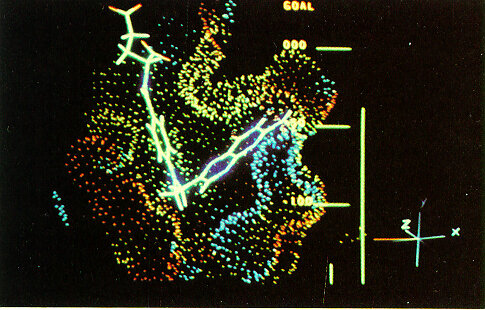
Παρόλα αυτά, το GROPE απέδειξε ότι η χρήση πολλαπλών αισθήσεων (multimodal interaction) βελτιώνει δραματικά την επίδοση του χρήστη. Οι μελέτες που διεξήχθησαν έδειξαν ότι οι χημικοί μπορούσαν να βρουν τη βέλτιστη θέση σύνδεσης μορίων έως και δύο φορές γρηγορότερα όταν η συσκευή εισόδου τούς παρείχε αντίσταση, σε σύγκριση με την απλή οπτική καθοδήγηση [3]. Αυτό το εύρημα άλλαξε τον τρόπο που σκεφτόμαστε για τις συσκευές εισόδου: δεν είναι απλώς μέσα μεταφοράς εντολών, αλλά κανάλια αισθητηριακής αντίληψης.
Η κατανόηση της σημασίας της φυσικής ανάδρασης, όπως αναδείχθηκε από το GROPE, αποτελεί τη βάση για όλες τις σύγχρονες απτικές συσκευές (haptics). Από τα χειριστήρια παιχνιδιών που δονούνται μέχρι τα χειρουργικά ρομπότ Da Vinci, η λογική παραμένει η ίδια: η πληροφορία δεν πρέπει μόνο να φαίνεται, αλλά και να γίνεται αισθητή [4].
Παρά το γεγονός ότι ο βραχίονας ARM θεωρείται πλέον αρχαίος τεχνολογικά, η κληρονομιά του Project GROPE είναι ζωντανή. Πρώτον, καθιέρωσε την ανάγκη για 6 βαθμούς ελευθερίας (6DoF) στις συσκευές εισόδου τρισδιάστατου σχεδιασμού. Δεύτερον, απέδειξε ότι η “διαφάνεια” του συστήματος (system transparency) είναι κρίσιμη: η συσκευή πρέπει να γίνεται αόρατη στην αντίληψη του χρήστη ώστε αυτός να εστιάζει στο έργο του. Τρίτον, προετοίμασε το έδαφος για τη σμίκρυνση της τεχνολογίας, οδηγώντας στα σημερινά φορετά γάντια και τους εξωσκελετούς δακτύλων.
Συνοψίζοντας, το Project GROPE και ο βραχίονας ARM αποτελούν τον «μηχανικό πρόγονο» της ενσώματης αλληλεπίδρασης. Αντιπροσωπεύουν τη στιγμή που η Επιστήμη Υπολογιστών αντιλήφθηκε ότι για να χειριστούμε τον ψηφιακό κόσμο φυσικά, δεν αρκεί να βλέπουμε μια οθόνη· πρέπει να έχουμε τα χέρια μας μέσα σε αυτόν. Το GROPE δεν ήταν απλώς μια οθόνη με μοχλό, αλλά μια πρωτοποριακή συσκευή εισόδου που δίδαξε στη μηχανή πώς να αγγίζει τον άνθρωπο πίσω.
Βιβλιογραφία
[1] Brooks, F. P., Ouh-Young, M., Batter, J. J., & Kilpatrick, P. J. (1990). "Project GROPE - Haptic Displays for Scientific Visualization." Computer Graphics, 24(4), 177–185.
[2] Burdea, G. C. (1996). Force and Touch Feedback for Virtual Reality. John Wiley & Sons, Inc., New York, NY, USA.
[3] Ouh-young, M., Beard, D. V., & Brooks, F. P. (1989). "Force Display Performs Better than Visual Display in a Simple 6-D Docking Task." Proceedings of IEEE International Conference on Robotics and Automation, 1462–1466.
[4] Sutherland, I. E. (1965). "The Ultimate Display." Proceedings of IFIP Congress, 506–508.